
Des de la perspectiva de l'estructura funcional, l'execució del generador de buit és principalment la vàlvula de control electromagnètica per controlar el generador de buit per generar pressió negativa i aturar-se, per aconseguir la funció d'atraure i alliberar la peça de treball.
Com a resultat, el sistema generalment inclou els components següents: 1. Font d'aire comprimit;2. Filtre;3. Interruptor de la vàlvula de solenoide;4. Actuador de buit;5. Ventosa final, airbag, etc. (A la figura següent es mostra una estructura típica).
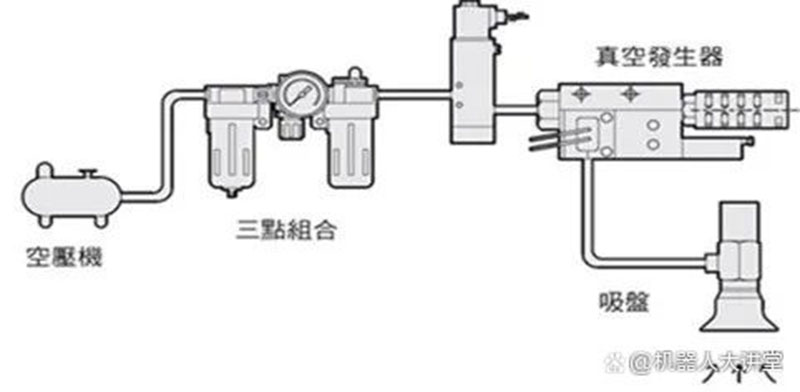
A més, segons els requisits de l'automatització industrial, per tal de realitzar el seguiment del procés d'adsorció al buit, alguns fabricants generalment afegeixen components de control pneumàtic com ara mesuradors de cabal, interruptors de detecció de pressió i interruptors de proximitat al sistema en els darrers anys.
Tanmateix, com que la majoria dels components són modificats per l'integrador segons les necessitats del client i les condicions de treball in situ, la complexitat de tot el sistema sovint és alta.
Al mateix temps, diversos fabricants de components condueixen a treballs d'instal·lació i posada en marxa complexos in situ, i alguns d'ells tenen un alt consum d'energia i una dependència del 100% de les fonts de gas.La integració parcial pot no ser possible
Eviteu la contaminació acústica, la qual cosa significa problemes inacceptables per a entorns d'alta precisió i d'alta neteja, com ara bateries de liti i semiconductors.
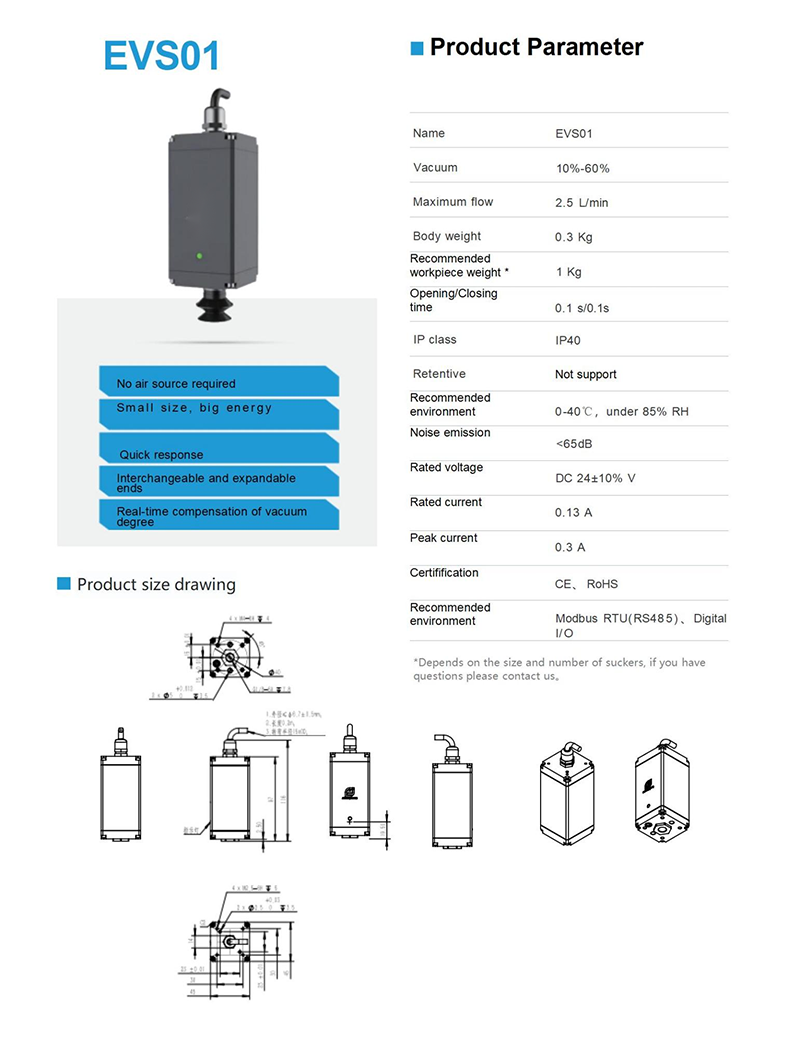
En conjunt, EVS és una nova generació d'actuadors de buit elèctric intel·ligent que no requereix una font d'aire comprimit addicional, cosa que sens dubte crida l'atenció.
El major avantatge del sistema d'estalvi d'aire és la seva facilitat d'instal·lació.Perquè, sens dubte, això pot reduir molts components auxiliars, com ara compressors d'aire, dipòsits d'emmagatzematge d'aire, equips de purificació d'aire i canonades de sortida, etc., fent que el cablejat sigui més fàcil, còmode i clar per als clients.
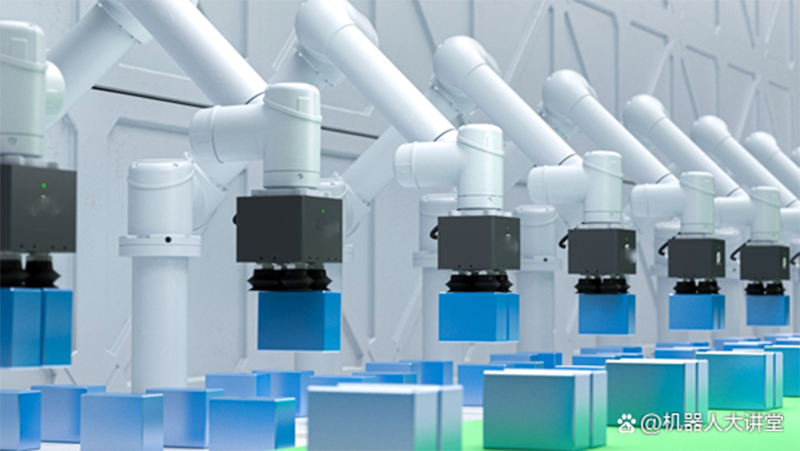
S'informa que actualment moltes escenes, com ara plataformes de robots mòbils, muntatge electrònic 3C, fabricació de bateries de liti, fabricació de semiconductors, logística exprés, etc. tenen un disseny espacial relativament compacte.
Bateria quadrada d'aspiració EVS08
Més detalls i avantatges
La sala de conferències del robot va saber que aquest producte, que sembla molt petit i només pesa 2,5 kg, pot arribar a un alt nivell de 10 kg.A causa del disseny de baixa tensió de 24 V, el consum d'energia és del 20% del sistema pneumàtic tradicional, i la força d'adsorció al final es pot configurar i ajustar, i la força d'adsorció pot arribar a 102-510N.
Pel que fa al disseny estructural, EVS adopta un disseny estructural més compacte i lleuger, que fa que EVS sigui un 30% més petit que l'aerodinàmica tradicional per al mateix pes de càrrega.
Al mateix temps, es pot connectar directament al connector a l'extrem del braç robòtic, la qual cosa redueix els components auxiliars redundants, fa que sigui més flexible d'ús, es pot desplegar ràpidament i pot absorbir fàcilment diversos objectes grans, especialment adequat per a apilament, manipulació i altres operacions d'escena.
Per tal de millorar la comoditat d'ús, l'actuador de buit elèctric també té una interfície integrada, que es pot utilitzar per controlar i controlar tot el procés d'adsorció d'objectes.
S'informa que això és per a la comoditat dels clients per controlar el grau de buit de l'actuador de buit mitjançant instruccions i també connectar-se mitjançant l'enllaç IO per al seguiment i manteniment predictiu del procés d'adsorció.El seguiment de l'estat reduirà els errors i el temps d'inactivitat i garantirà la disponibilitat del sistema.
Sobre aquesta base, els avantatges i característiques de l'SVE també es reflecteixen en els punts següents:
1. Estructura compacta i pes lleuger: EVS és un 30% més petit que la mida pneumàtica tradicional quan absorbeix el mateix pes de càrrega.Es pot connectar amb el connector a l'extrem del braç mecànic per realitzar l'absorció de la càrrega, especialment adequat per a l'apilament, manipulació i altres operacions d'escena;
2. Configuració de terminal abundant: es poden configurar diversos tipus de ventoses, coixins d'aire i altres components per aprendre a agafar diferents objectes, inclosos components quadrats, esfèrics i amb forma especial;
3. Els canals duals es poden controlar de manera independent: controleu fàcilment els costats esquerre i dret de l'actuador de buit, i els dos costats són independents entre si, millorant encara més l'eficiència de treball de la línia de producció.Realitza succió i col·locació alhora, la qual cosa facilita molt la manipulació i classificació d'objectes, estalviant espai i temps;
4. Aspiració ajustable: el grau de buit es pot ajustar segons les característiques del producte aspirat i es pot realitzar una compensació de buit en temps real;
5. Retroalimentació d'estat: té un sensor de retroalimentació al buit, que pot detectar l'estat d'adsorció dels objectes en temps real i proporcionar comentaris i alarma;
6. Protecció d'apagada: després d'apagar-se, pot realitzar un autobloqueig d'apagat per adsorció per protegir els objectes adsorbits;
7. Forta adaptabilitat: suporta el protocol de comunicació 24V I/O i MODBUS RTU (RS485);
8. Fàcil d'instal·lar i depurar: el protocol de comunicació és senzill i llegible, la qual cosa redueix molt la dificultat de depuració.A més, el programari de depuració de l'ordinador amfitrió es pot adjuntar com a regal, que es pot configurar i editar per establir paràmetres de funció fora de línia.
Conclusió i futur
Sota la tendència de l'automatització i la intel·ligència, els actuadors elèctrics de buit s'han convertit cada cop més en un component clau per garantir el funcionament normal dels robots i sistemes d'automatització, fent que l'ús dels sistemes d'actuadors elèctrics sigui més còmode i fàcil d'utilitzar, i poden satisfer escenaris més diversificats com ara robots composts mòbils..
La interfície integrada i la configuració rica del terminal i altres optimitzacions poden millorar encara més la fiabilitat dels components clau del robot, reduir les aturades de producció i els problemes de desplegament remot per als usuaris finals i reduir encara més els costos de manteniment i postvenda.
Hora de publicació: 19-abril-2023